
The history of this project is long, and it is a history of my own passion for innovation falling on fertile ground when I presented my ideas to Serpent.
Some basic ideas were in my mind for a very long time. While I know the love to details is very important, especially regarding setups of 1/10th scale touring cars, I was convinced that modern touring cars with their concept are at their limit, and at some point, if you want to do further progress, you have to take a different route and show up with some true innovations.
In summer 2013 I decided that I finally want to work on a completely new, revolutionary car. I was inspired by fullscale racecars, and I wanted to have a system with decoupled roll and heave/pitch suspension as it can be found on some fullscale F1 cars, but basically also in the rear of RC-pancars (like F1, 1/12th).
So I came up with the idea of a classical pushrod suspension, which gives many freedoms in shock arrangement. You can build a car which has one spring and damper per wheel, or you can have a classical third spring arrangement where a third spring and damper supports the vertical movement of the car. Both were used a long time in many fullscale motorsport cars. In recent years, some F1 teams came up with the idea to completely eliminate the springs and dampers per wheel. Basically they relied on their previous 3rd spring as the sping for vertical movement, and the antirollbar for the roll movement of the car, and that was exactly what I wanted to have. Besides a certain weight advantage compared to a 3rd spring setup, this gives the possibility to tune the suspension for vertical movement (aero, bumps and accelerating/braking) and roll movement (cornering, curbs) completely independent.

However, as I knew from experience (and also in theory) that the CG (centre of gravity) of the car has a considerable effect on the performance, I was afraid that a classic pushrod design will lead to a higher CG thus reducing the cornering ability of the car.
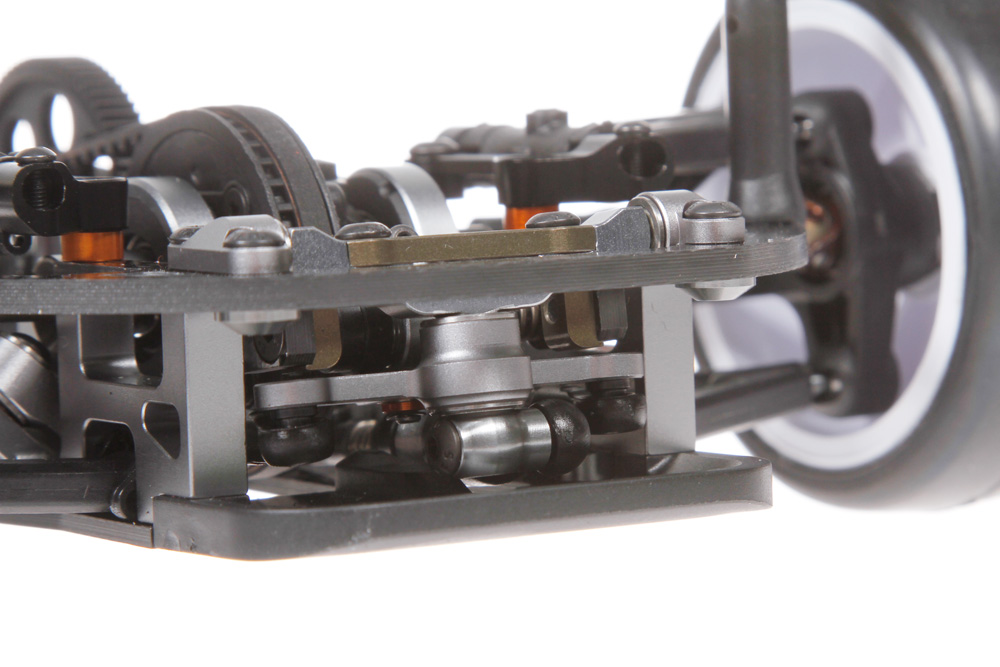
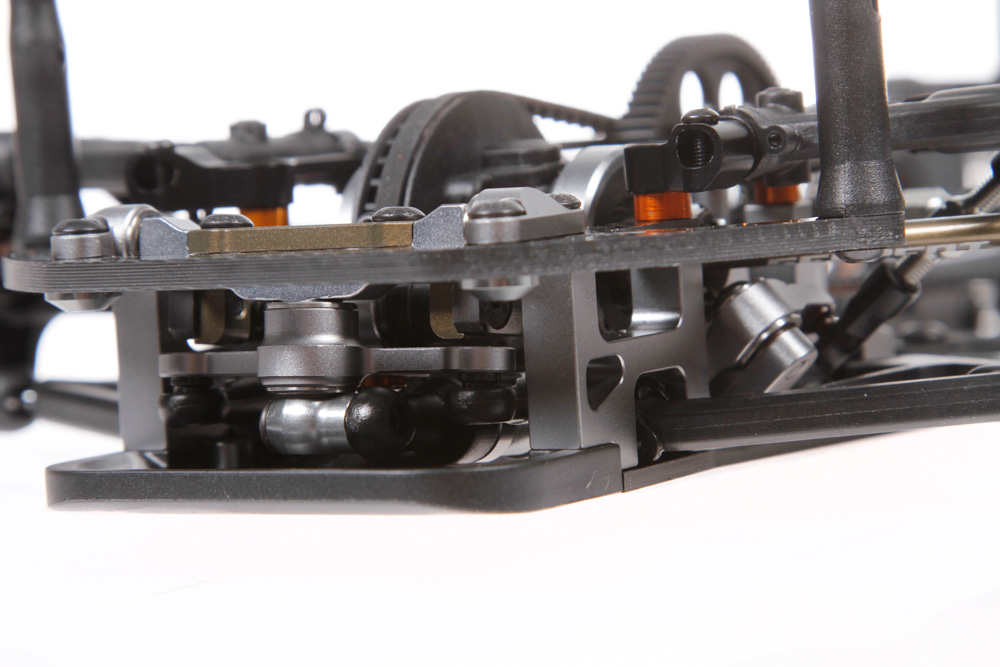
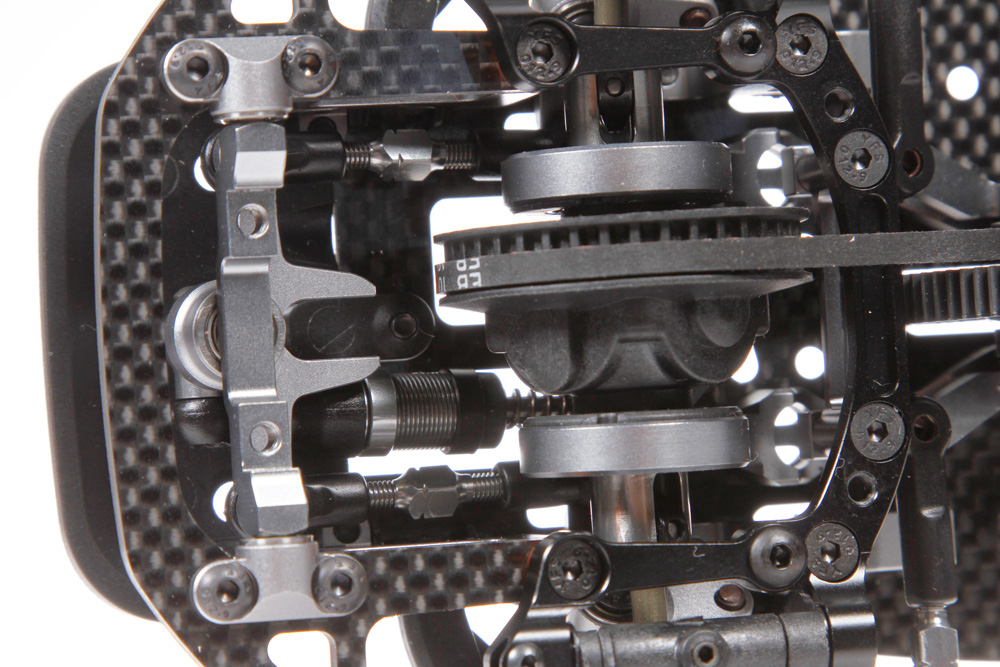
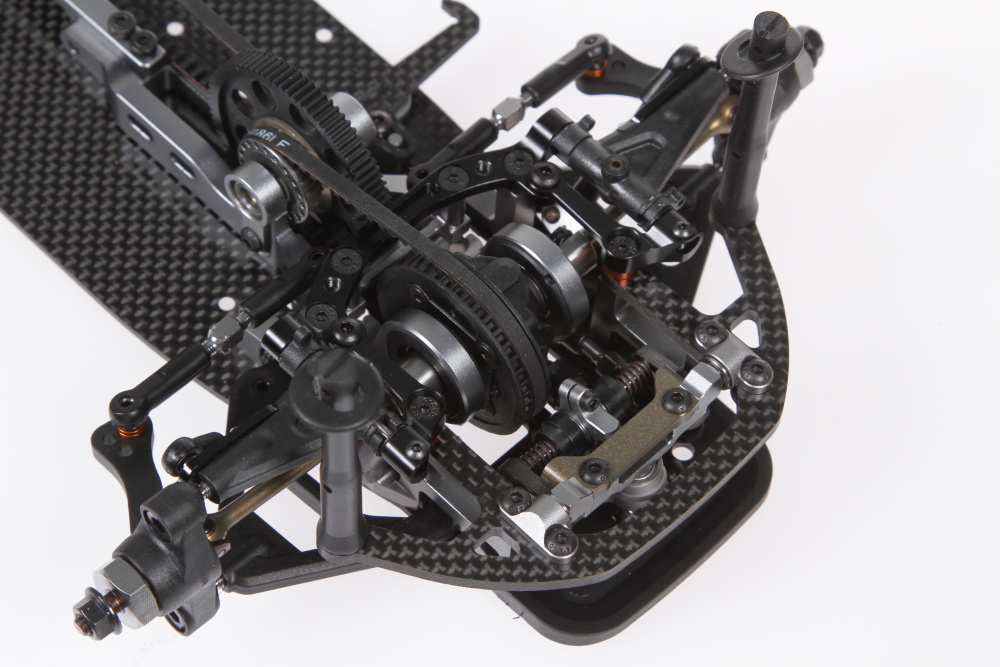
So I came up with the idea to use a pullrod design instead of a pushrod design. While the idea is logical, if you put the shocks lower in the car, you get a lower CG, it is not so easy to make that work. Basically the heave damper needs to be somewhere below the diff, and of course the rolldamper also needs some room in the car. If you check your standard touring car, you will quickly realize the implications.
After some investigation and concept work, I contacted Michael Salven, at that time responsible for the whole Serpent onroad program, to show him my ideas. He really liked it, but was not sure if it would be possible to solve all those challenges associated with this project.
Of course I was convinced it would be possible. So I asked if Serpent would be interested to produce a new revolutionary car, if I would design one. After some internal discussion I got the ok. Asking if there would be any limitations, I got the surprising and best possible answer for any designer: “Go ahead, there are no limitations. Just don’t copy any other car”.
I could start on a blank sheet of paper, something that is very rare in the RC industry. Those were ideal conditions to work on something great. And knowing that Serpent would really build that car, this was my dream becoming true, so I worked on it almost every evening after my regular job and on weekends when there were no races.
As Michael continued to develop the 411 platform, I did not need to care about that, and also I had no time pressure, except the pressure I put to myself.
The first thing I designed was actually an upright. Of course this was not yet the final design, as with the car growing around that upright, a lot of constraints had to be fulfilled, and in the end, the upright had nothing to do with the first design.
I had to investigate many things to make that concept work. Just imagine: the small-diameter shocks in combination with the through-rod-piston had to be developed and the unique rolldamper unit needs to work. Also whole pullrod mechanism had to fit somewhere besides the suspension arms, driveshafts and steering system. And of course it should be possible to remove the diff and also the dampers without disassembling half the car.
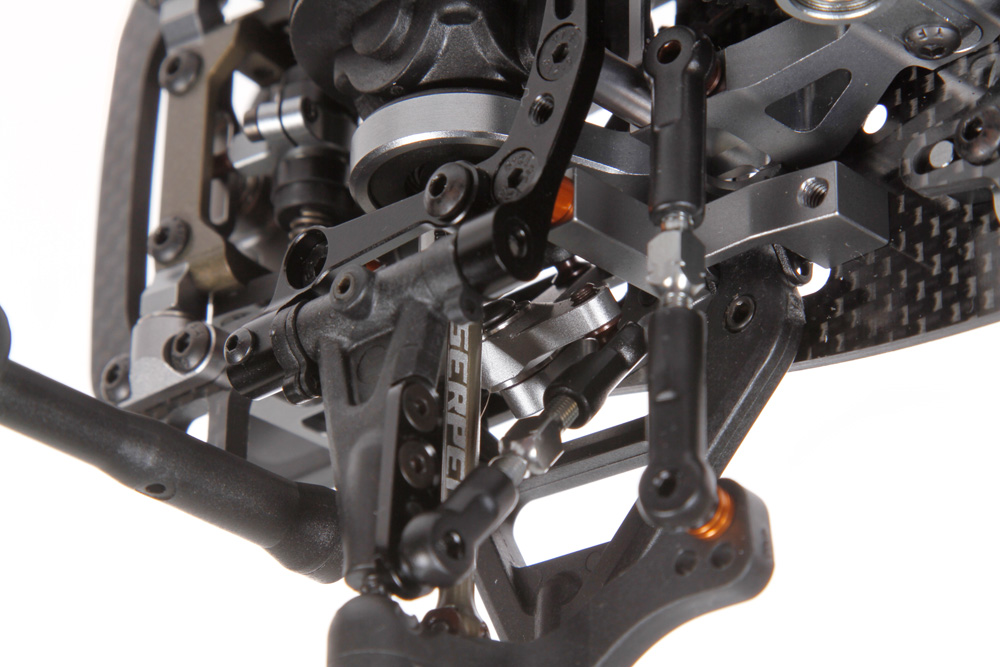
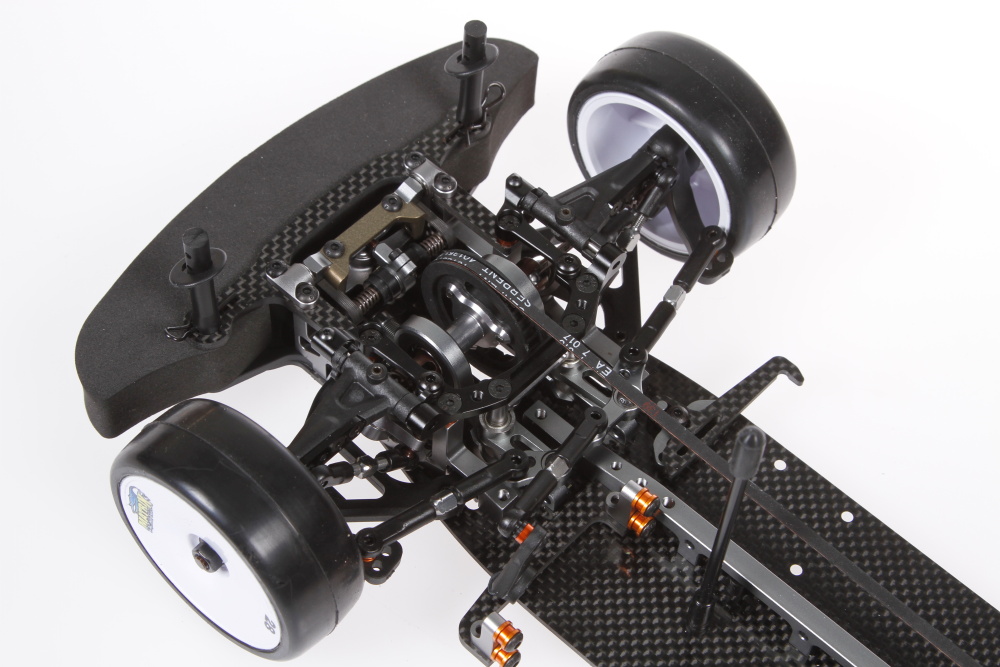
On many occasions I had to decide between different solutions, where both had their advantages and disadvantages. But sometimes the problem to fit an old solution led to something better. This is particularly the case with the steering system. There was no way to make the classic touring car steering system fit together with the suspension. But as this system has some drawbacks anyways, I could find a better solution, with more consistent Ackermann curves. It is the first time that you can actually use almost perfect Ackermann steering and easily change the setup to parallel steering with an electric touring car.
After all that work being done, I presented the car to the Serpent management, as well as to my teammates. And imagine, although they liked it, they came up with a lot of points where some things needed to be repositioned. Some of these things were just small changes, but others were really a lot of work. In late autumn 2014 the design had reached a level to produce a first prototype. I was really excited, when I held it in my hand. This prototype was not meant to race. It was more a mock-up, with many parts (even the driveshafts) made of 3d printed material. But still this prototype helped a lot. It gave a feeling for the parts, and indicated that the work was going in the right direction. The design at that time had already the low CG that the car has now, but at cost of shorter suspension arms. Michael suggested to reposition almost all parts a little bit in a way he thought it should be possible. He also helped me with some optimisation and design work afterwards. Especially he invented the rollcenter adjustment and the one-piece motor mount which he also put into the Eryx 4.0 at that time. If you work on a project for a longer time, you just need someone else to look at your work to avoid tunnel vision.
When I first saw how far he had moved some components, I thought, whow it might be difficult to make that work. But after many evenings and weekends of work, it was done and at the beginning of 2015 I held the first drivable prototype in my hands. You can imagine, I was proud. I wanted to go testing the next day, but I had a lot of work during that night, as obviously, a first prototype has a lot of problems with tolerances and things like that. Of course I finished building the car too late, and there was only time for a small rollout to check if everything is working. Although the correct spring rates were far from the ones I had planned, the car was driving not that bad.
As a designer, working on a standard touring car design is straightforward work nowadays. Of course it is not that easy, and you can do many things wrong, as you can see with all that cars that look very similar, but perform very different on the racetrack. But you already have the concept, and can focus on certain areas to optimize. When you finish the design, and go to prototype testing, you usually have already an idea of how it will drive.
With the 4X it was a different story. Being completely new, all areas needed to be investigated at the same time, and as many parts depend on each other, I could not work through the parts one by one. I had to make several iterations, and with each iteration the car became more mature, more complete, and also in a way closer to reality. Before the first test, I was really nervous how the car would behave on the track. But it was not that different, and apart from some setup issues (for example I did not have the correct springs yet), it drove like a touringcar.






























A few days later, I went to my home track in Beerfelden with the correct range of springs, and did a lot of testing. The main task at that time was to find the correct setup window for the car. You can calculate many things before, for example how the spring stiffness should be to make it comparable to other cars. But in the end, it is a different concept, so you end up very different.
It was a very good feeling to see how the car behaved after just a few batteries testing. From the very first test it was noticeable, the car takes more cornerspeed through fast corners and is very forgiving when you drive over curbs.
Of course we found some problems during the tests, and many parts had to be redesigned. Basically the car was actually not aggressive enough and it was difficult to get around tight corners, especially if the grip was not as high. Although the basic principle was always to make working on the car as easy as possible, and we had a mock-up prototype before, there were still some problems left making it very difficult to wrench on the car.
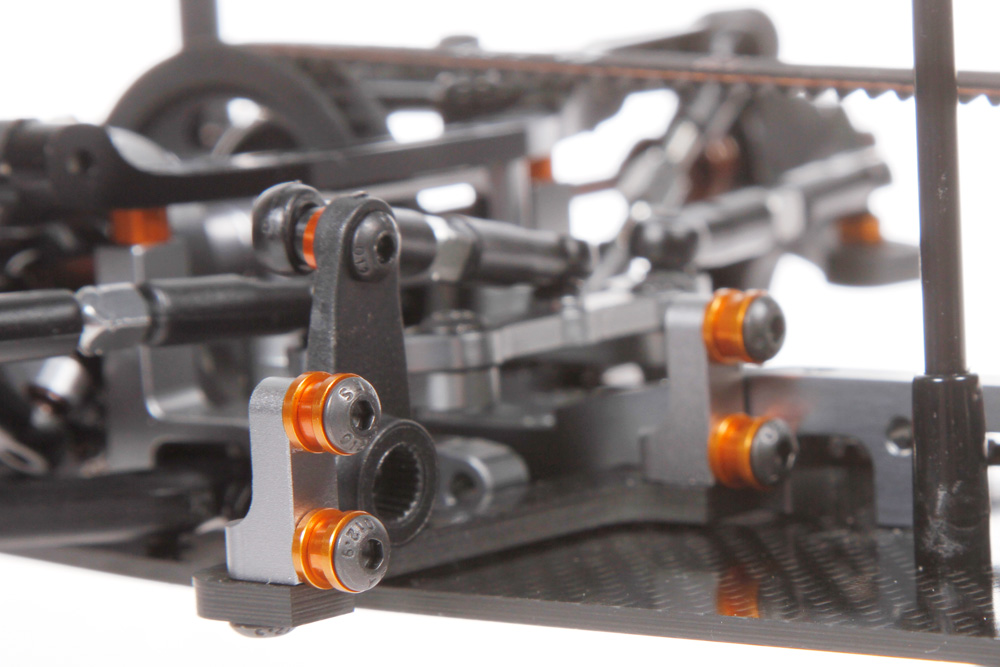
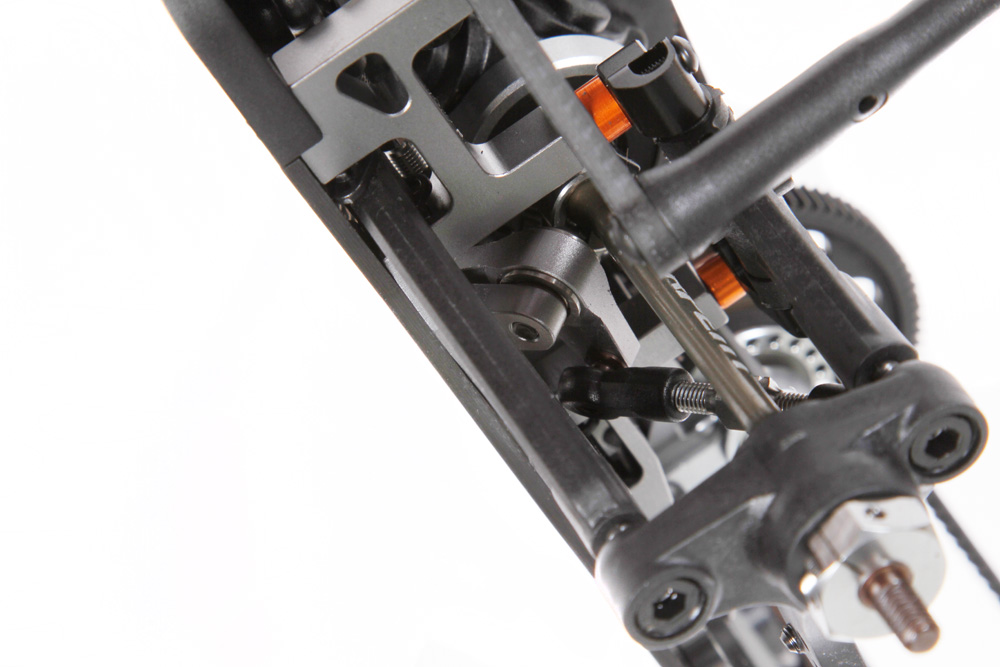
So I had to change quite a few things. It was a mixed bag of problems. Many small things, and a few of the many new ideas in the car really didn't work as intended, so I had to use some backup options. The concept with backup options is one thing I learned in the precision machinery industry. We often had very innovative ideas in our new machines, but when you don't know if the new idea will work, you have to make sure there is a backup. In this case, I had a very innovative idea to change the spring rate and ride height. Unfortunately, there was a major problem with that, so I had to abandon it. That meant I had to go to the backup solution with classical coil springs. That meant on this prototype I had to change the ride height with shims and with the length of the pullrods. While that design was straightforward, the problem is, you have to remove the shock to adjust it, and re-attach it to measure the ride height. So for fine tuning you will rather use the pullrods, but that means, there is always a chance to get tweak by not adjusting left and right pullrods at the same time. That is something you can work with in testing but not in racing. So I designed a new, comfortable excentric ride height adjustment for the final version.

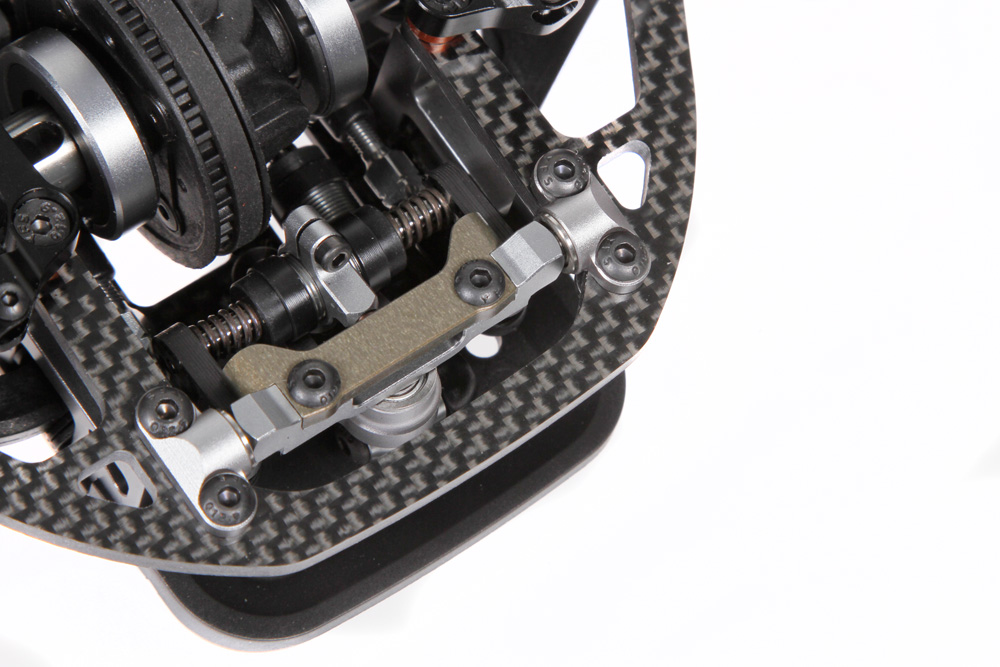
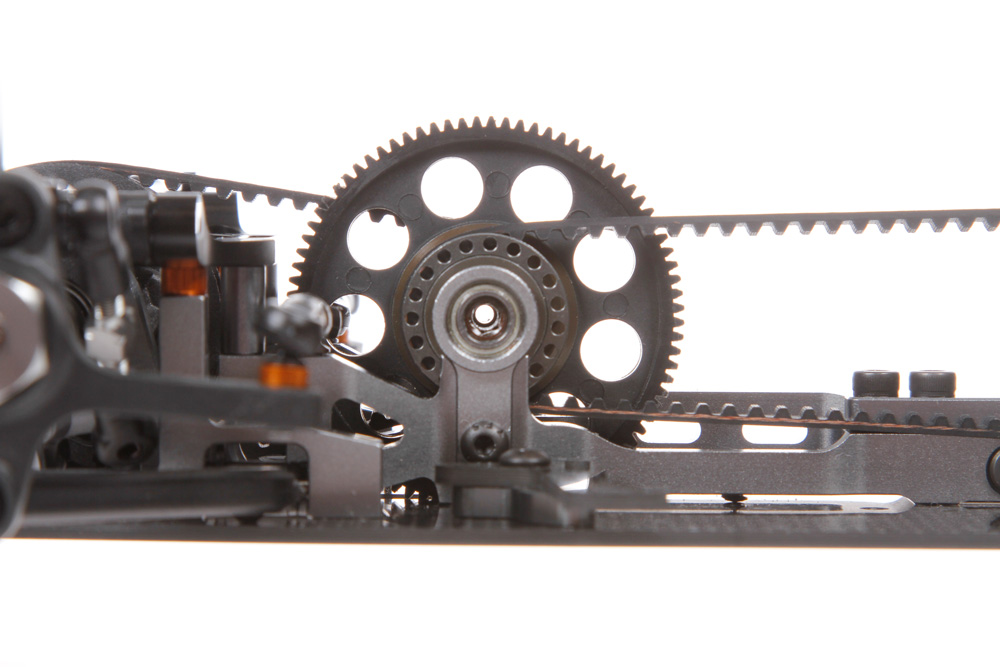
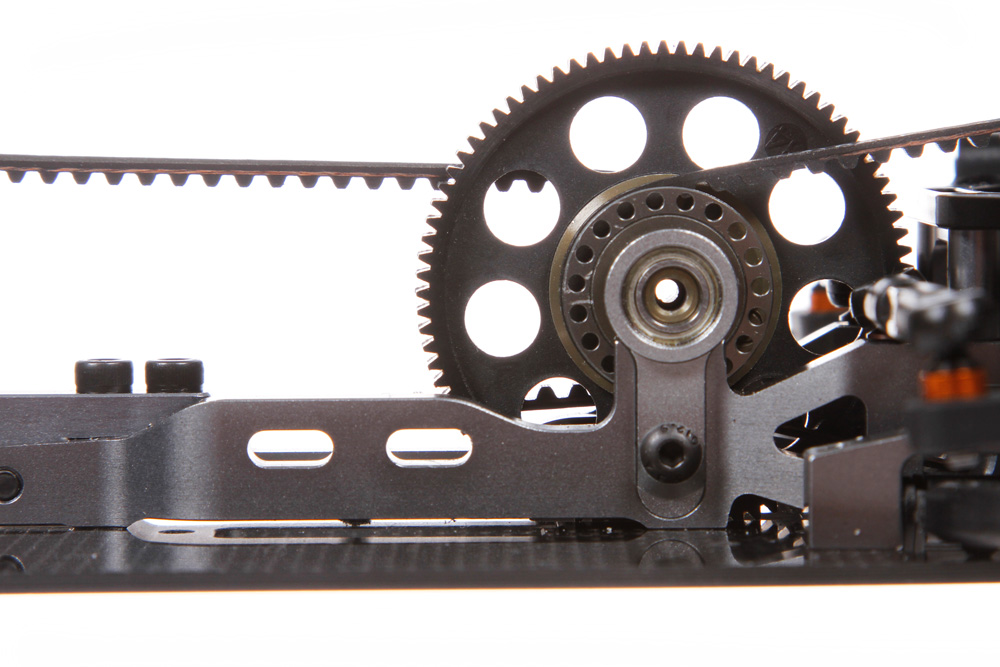
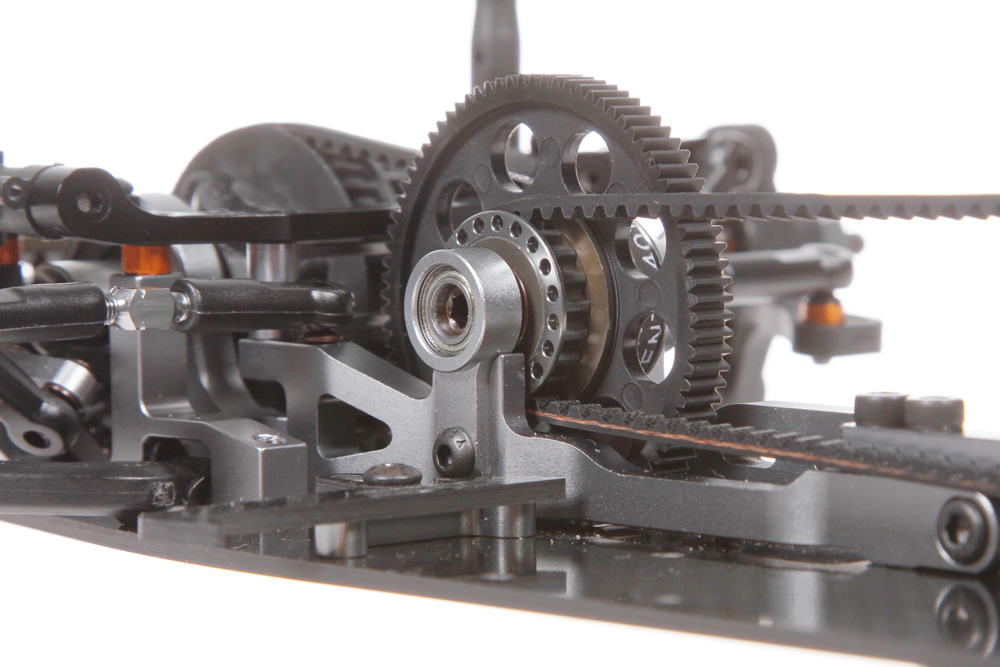
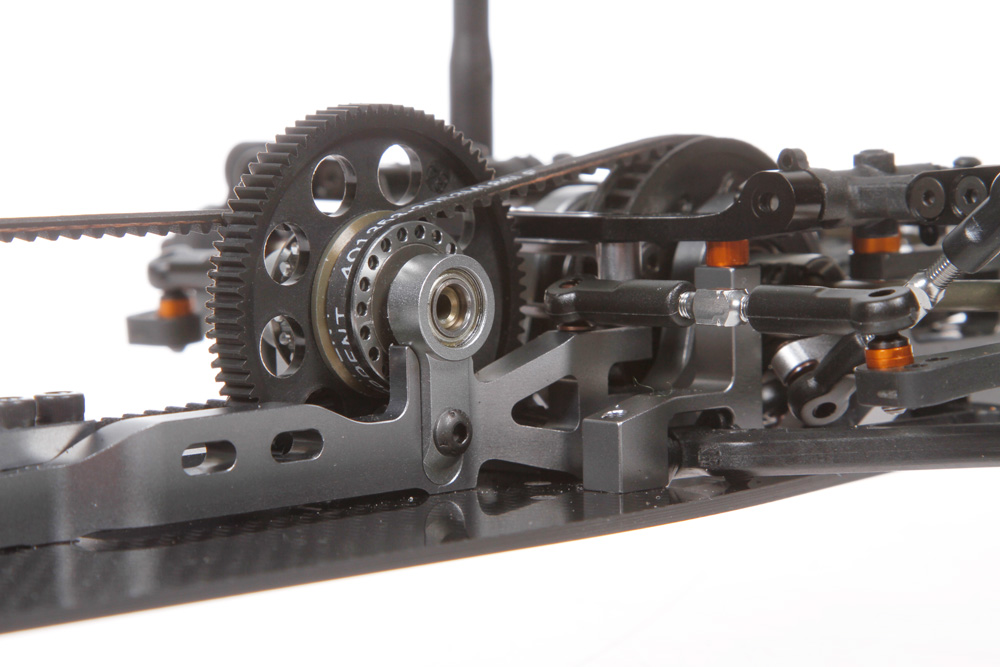
During the whole testing phase, I was always designing new parts which we tested on the car. While the performance of the car was good at most of the tracks, it was too difficult to work on the damper settings, as my fingers just were not small enough. So I made some more design changes that helped with wrenching on the car and also improved the suspension efficiency. Step by step I also approached the setup-sweet spot. You will enjoy how easy it is to remove a damper, the diff, the spur gear...
In the meantime, there was a big change for me. I quit my old job, and started to work fulltime for Serpent. That meant, now I had the time to really focus on this project.
For the indoor 2015/2016 indoor season we had decided to bring an updated version of the Eryx to continue to work on the ease of use and durability on the 4X, and also work on some tolerance issues and postpone the introduction, so that the car will be perfect when it is released.
Also with the new situation, I could discuss the manufacturing of all the parts directly with our factory now. While this phase did not bring the car forward regarding performance, it was the necessary and missing step to mature the car. As we were starting to let our professional drivers use the car during races, a lot of new issues came up and I was very busy updating the car regarding their feedback.
When our professional drivers started to use the Project 4X car at ETS in Austria, we clearly saw that the performance of the car was absolutely at the top of the game. From that moment we had at least one of the cars in the A final at every single race we attended. But sometimes we had severe issues which needed to be solved. Especially the flex characteristic and a certain tweak issue made it difficult to reproduce laptimes after crashes.

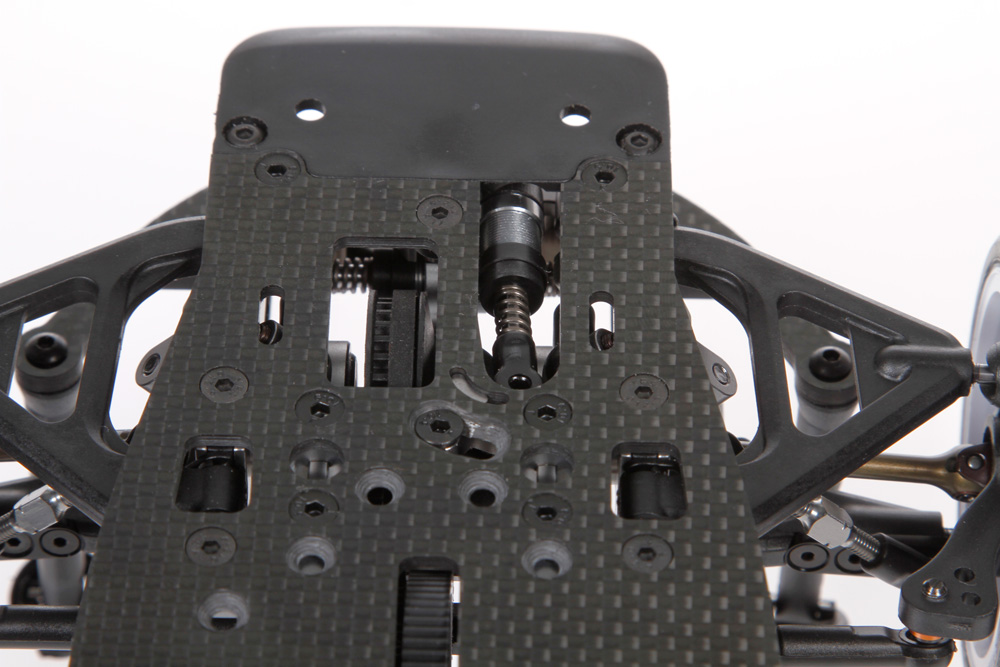
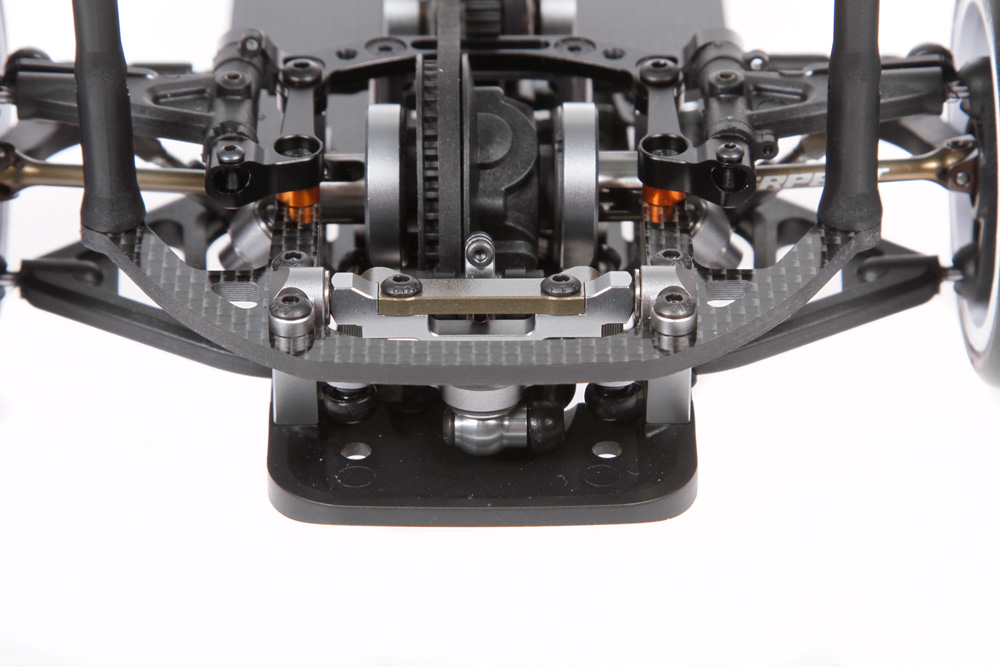
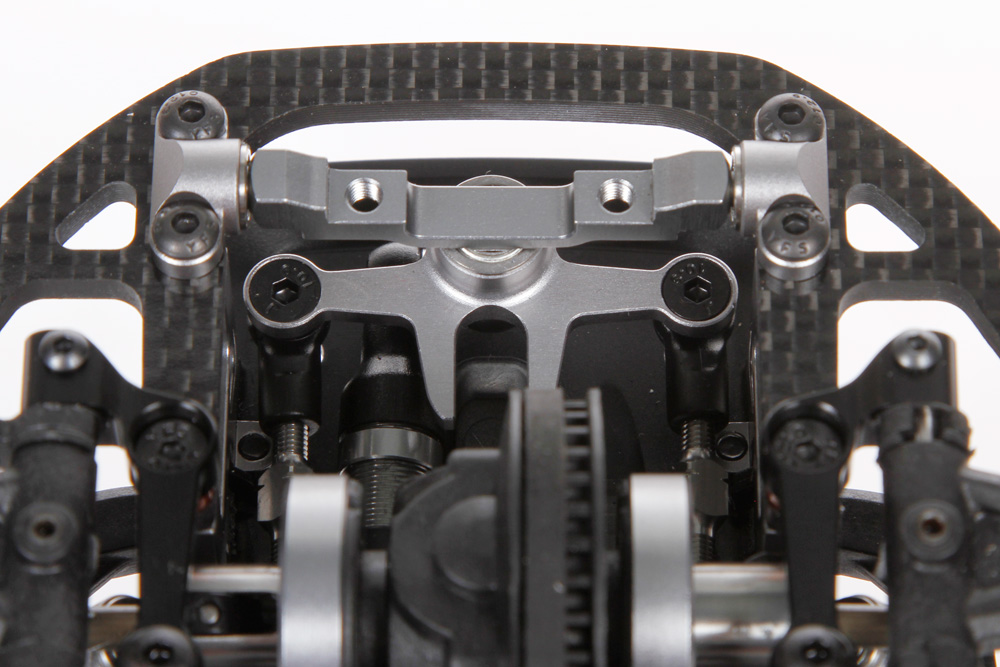
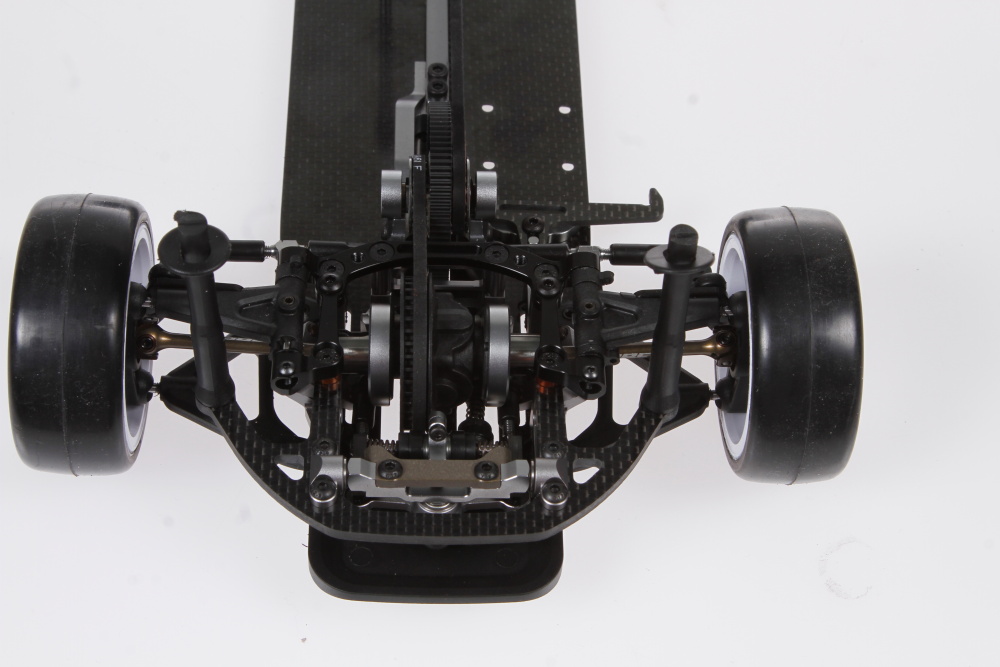
So I redesigned the complete main structure of the car. As the Project 4X car is designed to work without a topdeck, the design of motormount, center stiffener and the connection to the front and rear bulkheads is very critical. While for different reasons a certain amount of flex is necessary, the car should not be permanently bend along the longitudinal axis.
Also the suspension needed to be stronger to give our drivers the feeling they can really push the car without worrying about damaging it by having contact to the walls.
As I was optimistic we could solve these problems, we scheduled the release date to be around the World Championship in Beijing.
Going to the World Championship with a new car, and only one top driver is always a risk. But it was good to see that Viktor Wilck continued to show a strong performance with the Project 4X car with finishing 5th at the European Championship and making the A Final at all recent ETS races.
So we were optimistic that Viktor can make at least the A Final at the IFMAR World Championship in Beijing. Secretly I had hoped that our development work over the summer and Viktor’s driving in combination with all our testing work and all the efforts that the factory made to finish the release version of the car for the event would give us the chance to compete for the podium.
That hope strengthened after Viktor secured the top seed after the controlled practice runs and start qualification with number 1 on his car.
Viktor qualified 6th on the grid which was already a success, especially regarding his bad luck during the qualification runs. But when it comes to the finals you always need that bit of luck to make it happen. With Viktor having had his share of bad luck already during the qualification runs, he stayed calm and in the last final it was time for one of the big advantages of the Project 4X car: while all drivers were struggeling with the lower grip due to a change in weather conditions, Viktor could just rely on the Project 4X car, finishing an amazing run in 2nd place and secure his very first podium finish with a 3rd overall place at the World Championship.
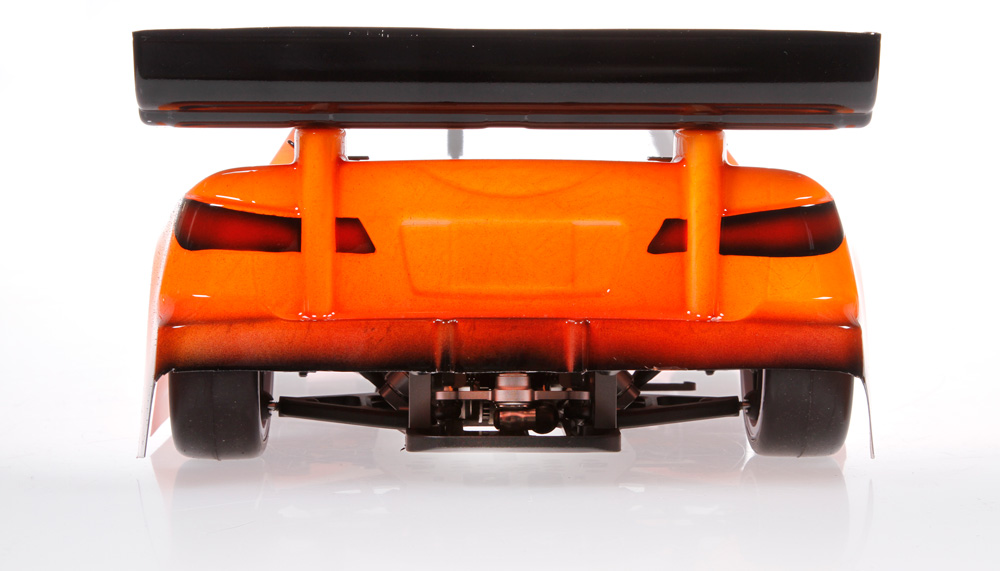
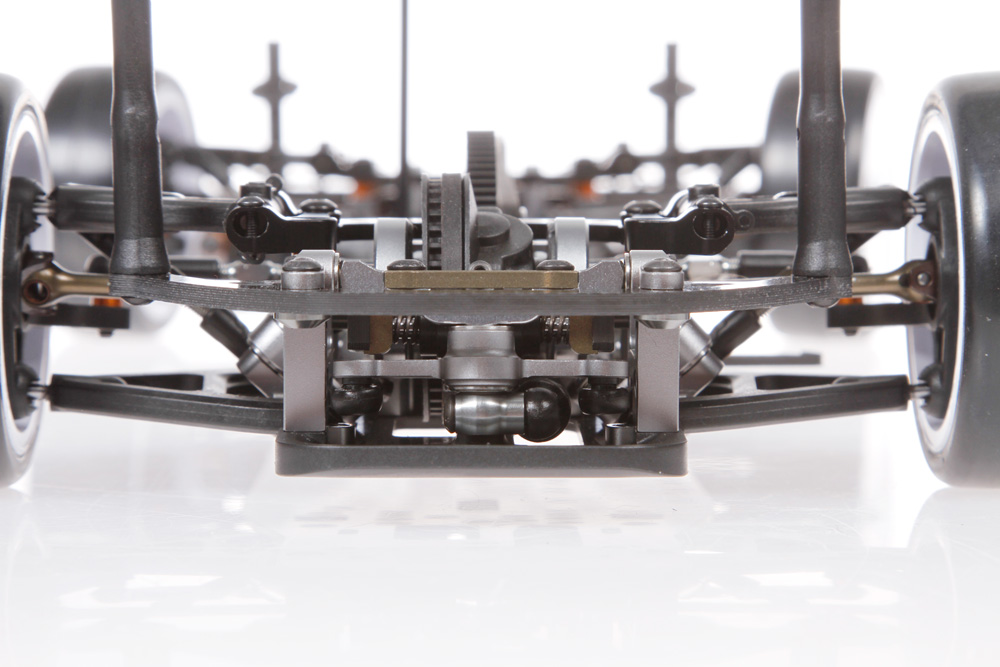
The car is tested on every possible race surface. With different tires, in big races and evening-practice sessions. We at Serpent did our homework. Now it is time for you to test the new Serpent Project 4X. Be part of our team. No matter if you are an A-finalist, midfield runner, or fighting for the last place: We care for all our drivers. Just send us an e-mail that you want to pit with our team one week before the race, and we try to arrange that.
Once you get used to the new way of how to set up the Serpent Project 4X, you will never look back. It is as easy to get the right setup as never before, and at the same time the Project 4X offers you new ways to push the envelope of performance wider as it has ever been.